Map
The map view provides an orthographic overview of your drones and other objects over the selected base map layer or map tile source.
Zoom, pan and rotation
The base map can be zoomed, panned and rotated flexibly with the tools available at its top left corner or with keyboard shortkeys and mouse moves. A Fit all drones button is also there to focus the view on all your drones.
Layers
Objects on the map appear in separate layers in order, such as Base map, UAVs, Features, Home location etc. The content, order and visibility of layers and thus objects associated with the layers can be altered on the Layers panel.
Flat Earth coordinate system
To ease navigation on the map, a flat Earth coordinate system can be defined with a custom map origin and direction. You can change the origin with a right click and selecting "Set map origin here" from the context menu. Alternatively, you can explicitly set map origin and flat Earth coordinate system orientation from the Display tab of the Preferences widget (top right on the header or File→Settings from the menu).
| Map rotation and coordinate system orientation are independent things but it is advised to set them to the same value not to get confused. Start with setting map rotation so that you see what should be the preferred direction of "front". If you are satisfied, set coordinate system orientation to this value as well. |
Measurements with the cursor
If you move the cursor over the map, a text box appears on the bottom right corner of the map showing the followings:
-
cursor position in geodetic coordinates (latitude, longitude)
-
cursor position in the defined flat Earth coordinate system
-
cursor distance and angle from map origin
| You can copy the actual cursor coordinates to the clipboard with Ctrl-Shift-C on Linux and Windows, or with ⌘-Shift-C on macOS. |
Selection and object actions
Different objects are associated with different actions that can be performed in the map view. To work with a given object, first you need to select it. A right click after object selection brings up a context menu that shows most of the actions provided for the given object.
| Selection of objects is global. If you select something (or more things) in one panel, the same selection will apply in the rest of the panels as well. |
Object types on the map
UAVs
UAVs are depicted with a black quadrotor icon with a red line pointing towards their front. The orientation of the icon is rotating with the actual heading of the UAV. The number below the UAV icons show their physical ID.
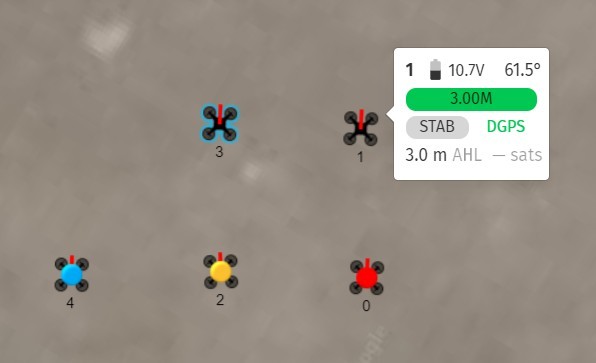
The appearance of the base icon changes in some cases to increase visual information content:
-
If the severity level of the overall status of a given UAV is raised to INFO, WARNING or ERROR, a blob will appear at the center of the UAV icon with color blue, yellow or red, correspondingly (see drones 4, 2 and 0 on the image above).
-
If a drone is selected, its outline will turn blue (see drone 3 on the image above)
-
If you move your cursor over any UAV, its tooltip will show summarized information about its status (see drone 1 on the image above).
| The assigned show trajectory of the selected UAV can also be visualized if it is enabled in the Mission Info layer in the Layers panel. |
Map origin
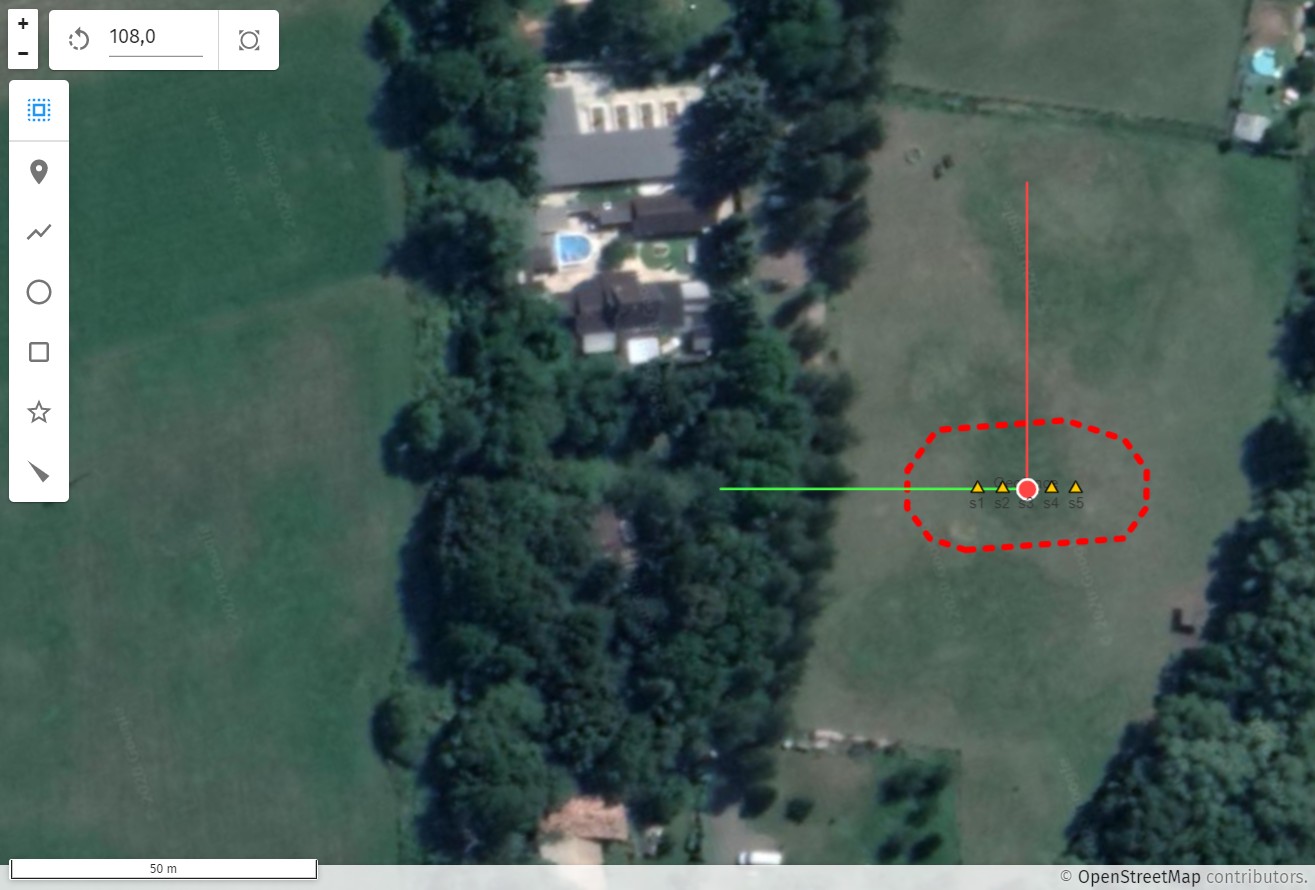
Map origin is depicted on the map as a red dot with a red line pointing towards the x, and a green line pointing towards the y axis of the defined flat Earth coordinate system.

If selected, map origin can be moved around on the map with holding the left button down and moving the cursor around.
Map origin together with map orientation can be used to measure distances and orientations on the map view, or to express drone coordinates in meters relative to the map origin along specific directions instead of absolute coordinates. The origin of the virtual 3D view scenery is also defined at the map origin.
Show origin and orientation
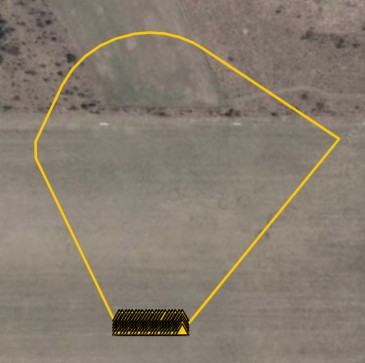
The show origin is depicted as a yellow arrow pointing towards show orientation.

Show origin can be moved around on the map with selecting the convex hull of the trajectories, then moving the cursor with left button down.
The show orientation can be changed (the show can be rotated) by selecting the convex hull and pressing Alt while moving the cursor with the left button down. Note that this rotation procedure is special compared to general feature/object rotations on the map in the sense that the center of the rotation is not the center of the object (as in the general case), but the center of the takeoff positions. This helps to maintain the location of take-off positions during rotation.
Changing the show origin and orientation naturally move and rotate other features that are based on these, such as home positions, landing positions and show trajectories.
Home positions
Home (takeoff) positions of a loaded show are shown with yellow triangles pointing upwards, with the show ID next to each one.

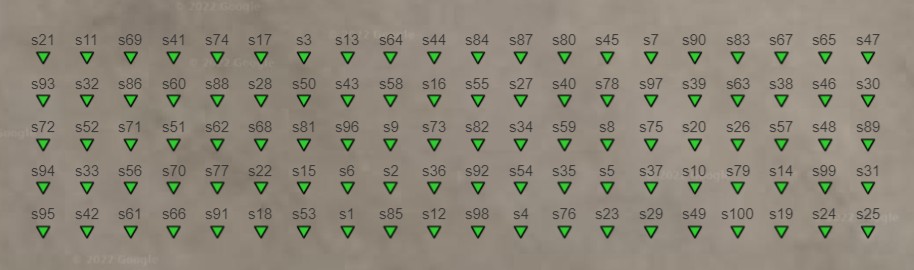
Landing positions
Landing positions of a loaded show are shown with green triangles pointing downwards, with the show ID next to each one.
Convex hull of trajectories
The convex hull of all show trajectories is shown with a thin yellow line. If the show goes well, drones will never exceed this area.
Features
The lower set of icons on the left side of the Map panel allows you to create and manipulate custom extra features on the map. The following feature types can be drawn:
-
Markers
-
Line strings
-
Circles
-
Polygons (with or without holes inside)
Some special cases derived from the base feature types are also supported:
-
Rectangles (as a special case of general polygons)
-
Geofence (as a special case of a line string)
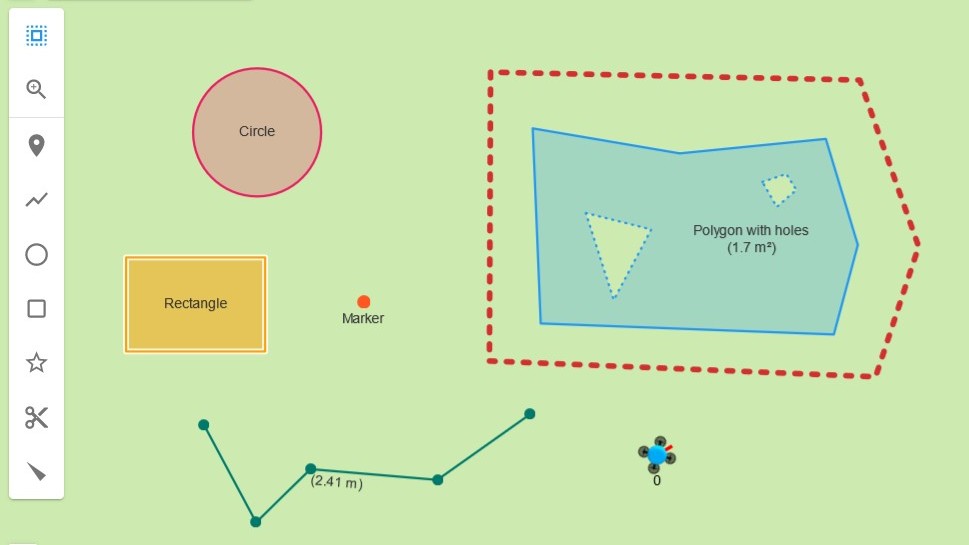
You can use the Cut hole into polygon icon to cut holes into polygons, or the Edit feature icon to modify existing features on the map.
Right-click on an individual feature on the map and open its properties dialog from the context menu to change its name, color and general appearance.
See the Features panel for more detailed information about the setup and usage of features in general.