Connection widgets
There are three connection widgets on the top left corner of the main window. Each of them has a LED indicator to show their overall status with the following color codes:
red |
error |
yellow |
warning |
green |
status OK |
| For a more detailed connection status move your cursor over the connection widgets and wait for the tooltips to appear. |
Output device connection
The only strictly required hardware component for Skybrush Sidekick is a radio module connected to the computer running Skybrush Sidekick. Please check our the Hardware requirements section for the list of supported radio modules.
If you click on the output device connection widget, a popup dialog appears to setup the connection.
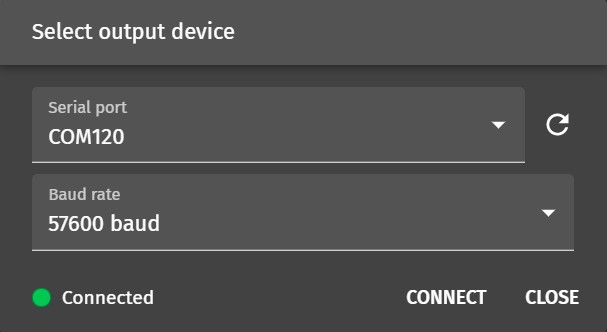
It is assumed that the output device is connected though a serial or USB-serial port with a given port name and baud rate. Set these up properly and press the CONNECT button to connect to the device. The green status LED on the bottom left corner indicates connection status.
Skybrush Server connection
Connection to Skybrush Server is optional but it is recommended, as it feeds useful status information from the drones to Skybrush Sidekick. It is also needed if you wish to send RTK correction data through Skybrush Sidekick as well.
The connection details can be setup in the SERVER page of the Preferences dialog. Skybrush Server typically listens on port 5002 for incoming Sidekick connections. The IP address of the machine running Skybrush Server has to be specified explicitly. If the server and Sidekick are running on the same machine, the IP address can be set to 127.0.0.1 (localhost).
RTK connection
if Skybrush Server is connected and Skybrush Live is configured to send RTK correction data to the drones on the primary wi-fi connection, these corrections can also be forwarded to Skybrush Sidekick to send them to the drones simultaneously on its secondary communication channel as a means of redundancy.
No explicit configuration is needed in Skybrush Sidekick to enable RTK corrections, and enabling them will not interfere with the same corrections sent over the primary channel, but the probability that the corrections with reach the drones will increase.