Geofence
The Geofence dialog lets you create geofence around your mission trajectories.
| The geofence is uploaded to the drones together with your mission. Do not forget to upload your mission again if you changed any of your geofence settings! |
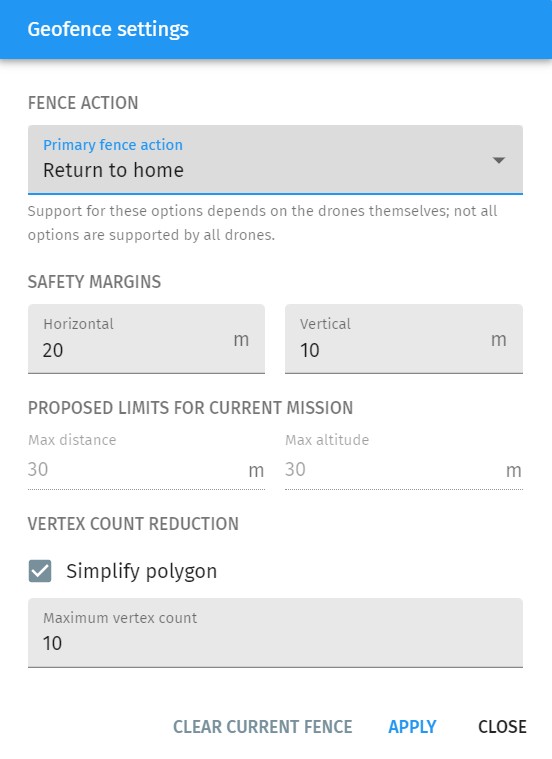
Fence action
You can define the primary action when a drone hits the geofence. Possible options are:
-
Keep current action (do not change the current settings of your drone)
-
Report only (only send a warning message from the drone to Skybrush when the geofence is breached, but do not take any specific action besides not letting the drone travelling further)
-
Return to home (when the geofence is breached, return to home position)
-
Land (when the geofence is breached, land immediately)
| Not all drone types support all action types. The list of options was designed to support all possibilities of ArduCopter based drones. |
Polygonal geofence
A polygonal geofence can be setup with the following parameters:
-
Horizontal and vertical safety margin around the trajectories
-
Maximum number of vertices in the geofence (if simplification is enabled).
If you press Apply, the geofence appears on the map by default as a thick red dotted polygon around your show convex hull.
After creation, the geofence polygon can also be edited manually on the map.
You can also create your own manual polygonal geofence with the tools available on the Map panel. In this case do not forget to set it as the geofence in its properties dialog (e.g. right click on the map, press "Use as geofence").
Max distance and max altitude limitations
Besides the polygonal geofence, a distance based geofence is also created both horizontally and vertically if the firmware of your drone supports that (ArduCopter does support this). The automatically calculated limits of these distance based geofences for the actual mission are shown as read-only parameters based on the given safety margins.