RTK status
The RTK status dialog shows details of the RTK correction data coming from the selected base station towards the UAVs.
To enable RTK connections, first select your RTK correction source from the dropdown list at the top. You can predefine new entries with configuring the rtk extension of your running Skybrush Server instance.
The top of the panel lists all RTCM messages configured for or available from the given RTK correction source. For each RTCM message type you can see the average bitrate (bps) occupied by the given RTCM message type, the enabled/disabled state on an RTCM message type according to the server’s rtk filter configuration (blue downwards arrow if the given message type is received from the RTK correction source by Skybrush Server, and green upwards arrow if the message is configured to be forwarded from the Skybrush Server to the UAVs), and the time since the last message of a given type was sent to the UAVs.
At the bottom of the dialog you can check the visibility / signal strength of individual satellites and see which ones are used for RTK correction.
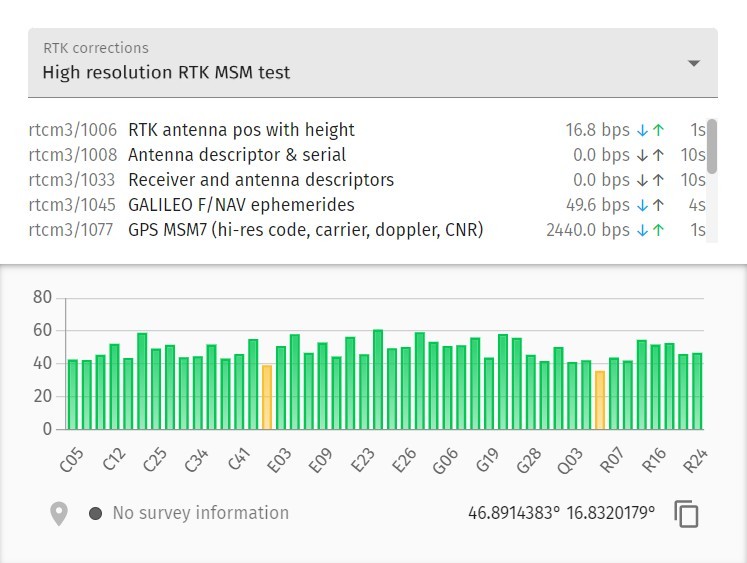
When the RTK source is a local base station, it starts up automatically in surveying mode to find out its own location before transmitting the correction signals.
You can setup the minimum length and the required accuracy of surveying at the bottom-left of the dialog. If surveying is in progress or is ready, the actual surveying accuracy is also indicated here.
If surveying is successful or the base station is setup manually, the position of the base station will also be indicated at the bottom-right of the dialog window (you can toggle between ECEF and lat/lon display by clicking on the actual coordinates).
| The currently supported RTK sources with auto-surveying functionality is listed in the Hardware requirements section. |