Properties
The Properties dialog enables you to get detailed debug information about a single drone, perform different tests and sensor calibrations on it or communicate with it through supported messages.
The Properties dialog can be activated from either the toolbar of the UAVs panel when only a single drone is selected, with a double-click on a single drone, or from the context menu after a right click on a single drone.
The left side of the properties dialog contains individual command buttons (take off, land, return to home, flash lights, arm motors, disarm motors, reboot, halt) and general status information of the drone under investigation. On the right side of the window you can select different tabs for different options.
Preflight tab
The PREFLIGHT tab shows you all available preflight status information in detail.
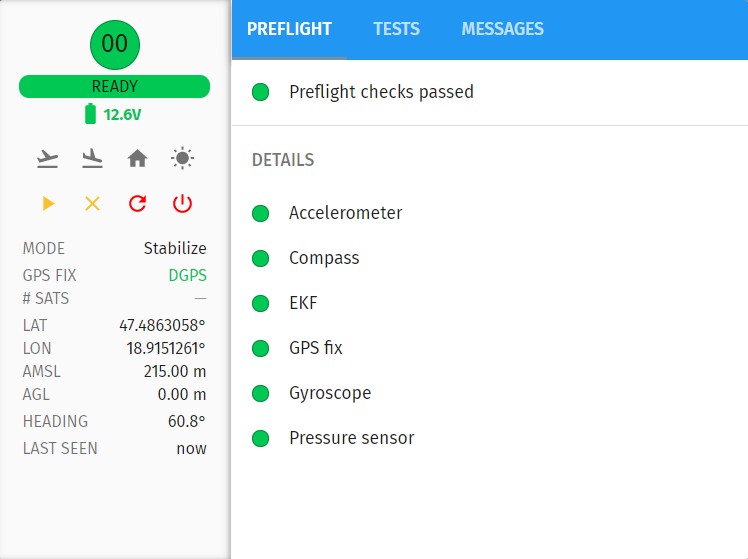
The general color scheme of Skybrush Live holds here as well, green means success, red means error etc.
Tests tab
The TESTS tab lets you perform different unit tests on the system components, such as a led test, motor test, baro calibration, gyro calibration.
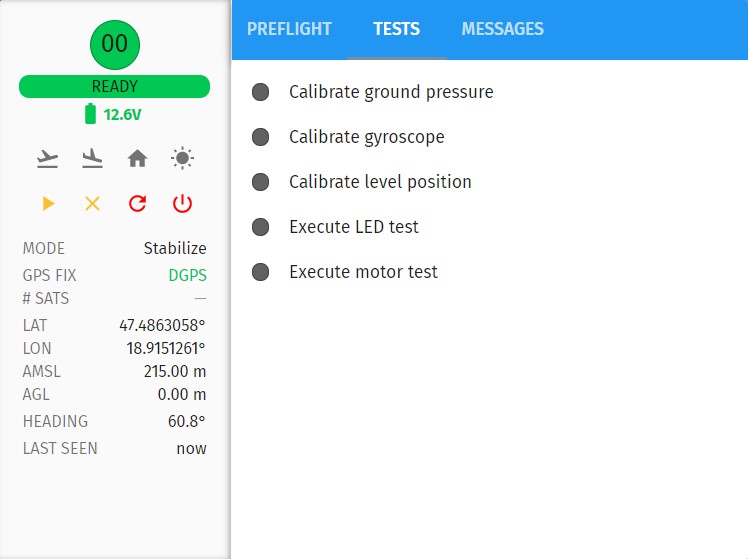
Click on one of the tests to perform it. The indicator next to the given test turning green means that the test has been performed successfully.
Messages tab
The MESSAGES tab enables you to send/receive direct messages to/from a given drone, typically for debugging purposes and to access functionality on the drones for which no GUI is provided yet in Skybrush Live.
General status messages coming from the drone automatically are also listed here (in case of MAVLink-based drones these are the STATUSTEXT type messages).
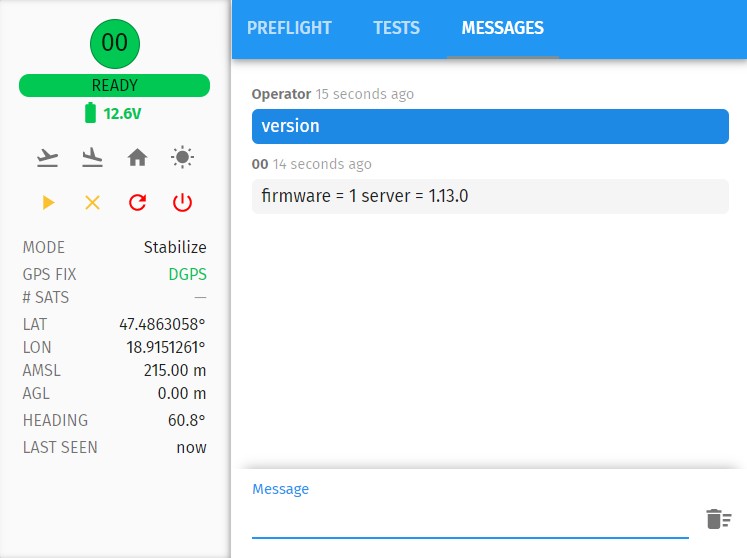
The set of messages understood by a particular UAV depends on its autopilot and the implementation of the autopilot driver in Skybrush Server. Typically, the version command is supported by most autopilots and will tell you the version number of the autopilot.
For Crazyflie drones and MAVLink-based drones with our custom ArduCopter firmware the following messages are available:
| usage | description |
|---|---|
|
override the light module with the given RGB color (use values for the |
|
override the light module with the given RGB color (expressed in hexadecimal numbers) |
|
override the light module with the given color if |
|
stop overriding the light module with GCS-based colors |
|
switch the drone into the flight mode given by |
|
get the value of an autopilot configuration parameter given in |
|
set the value of an autopilot configuration parameter given in |
|
performs LED test |
|
performs individual motor tests for all motors consecutively |
|
show the version of the autopilot |